# 2. Configurazione Modbus
Per impostare il controller in modalità Modbus Slave è necessario aprire la scheda *Settings > Remote Control*
e selezionare nel campo *Current Mode* la voce **Remote Modbus**.
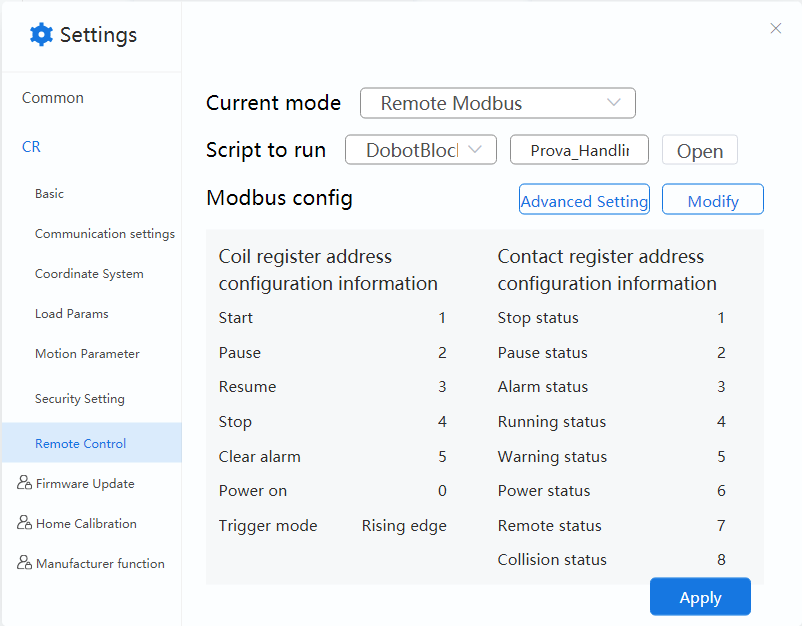
Tramite il tasto *modify* è possibile modificare la mappatura di base del robot.
Lo script da eseguire può essere configurato nel campo *Script to run*, mentre nel caso in cui sia necessario poterne eseguire diversi in base alle condizioni riscontrate sul PLC è possibile configurarli tramite il pulsante *Advanced Settings*.
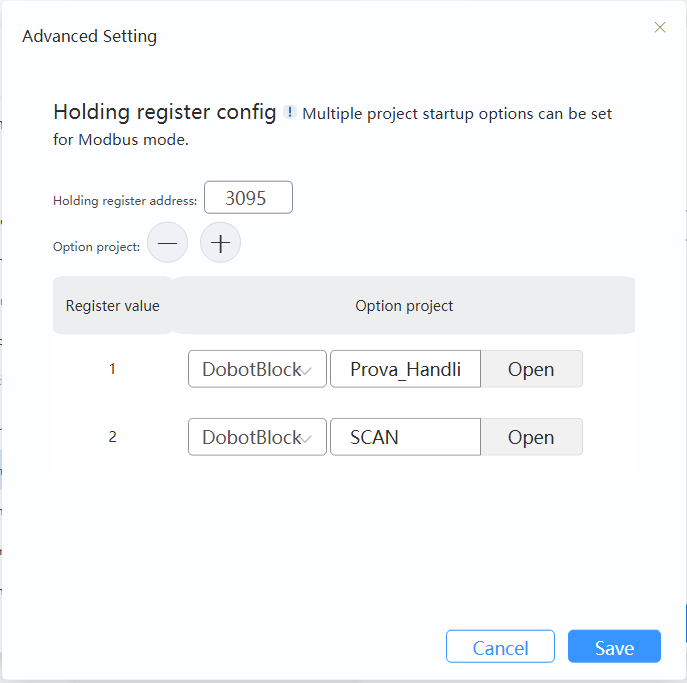
Tramite questa scheda è possibile impostare un Holding Register tramite cui selezionare lo script da eseguire in base alla lista sottostante
Ad esempio, in questo caso, se l'Holding Register con indirizzo 3095 ha valore 1 viene eseguito lo script Prova_Handling, mentre se ha valore 2 viene eseguito lo script SCAN. Tramite i tasti +/- è possibile aggiungere o rimuovere script dall'elenco.
ℹ️ Il nuovo script selezionato verrà eseguito **solo** dopo uno *stop* ed uno *start* del robot ℹ️
⚠️ ATTENZIONE: alcuni dispositivi Modbus indicizzano i registri partendo da 0 mentre altri partendo da 1, è quindi possibile incorrere in una discrepanza tra il registro scritto/letto da PLC e quello sul robot. In questo caso è sufficiente introdurre un offset di 1 negli indirizzi dei registri per riallineare client e server ⚠️