# PSD1 Profinet con FB Avanzato | v1.0.2
*Guida alla configurazione del PSD su bus Profinet con FunctionBlock avanzato*
# 0. Introduzione
## Obiettivi della guida:
- Collegamento fieldbus del PSD1
- Configurazione software del PSD per fieldbus Profinet
- Configurazione di base TIA Portal
- Introduzione alla Function Block avanzata per il controllo del PSD1
## Prerequisiti:
- Parker-Hannifin PSD1S/PDS1M Motor Drive
- PSD Servo Manager ([disponibile qui](https://www.dctrasmissioni.it/documentazione/?ct=1&br=1&pr=1))
- Siemens TIA Portal V19
- Pacchetto FB PSD1 avanzata ([disponibile qui](https://www.dctrasmissioni.it/documentazione/?ct=1&br=1&pr=1))
⚠️ La FB avanzata è compatibile unicamente con i seguenti PSD **multi-fieldbus** ad **asse singolo**
| Modello |
|------------------------------|
|***PSD1SW1***xxxx***2***xxxxxx|
|***PSD1MW1***xxxx***2***xxxxxx|
⚠️ La versione di PSD Servo manager **DEVE** corrispondere a quella del firmware PSD1
# 1. Collegamento del PSD1 Motor Drive
- Collegare il cavo ethernet della rete Profinet alla porta X62 dell'azionamento
 - Per configurare un indirizzo IP fieldbus in una classe differente dalla default `192.168.100.x`, impostare su 0 i due switch S12 ed S13 presenti sul davanti dell'unità, in questo modo l'indirizzo IP del PSD1 sarà configurabile tramite Profinet
- Per configurare un indirizzo IP fieldbus in una classe differente dalla default `192.168.100.x`, impostare su 0 i due switch S12 ed S13 presenti sul davanti dell'unità, in questo modo l'indirizzo IP del PSD1 sarà configurabile tramite Profinet
 ⚠️ Se l'operazione è stata effettuata con il PSD1 acceso, sarà necessario spegnerlo per qualche secondo perché la modifica abbia effetto
# 2. Configurazione del PSD1 Motor Drive
### Impostazioni Device
- In *Device > Device Settings > PSD multi filedbus*:
`Fieldbus type = Profinet`
### Impostazioni Profinet
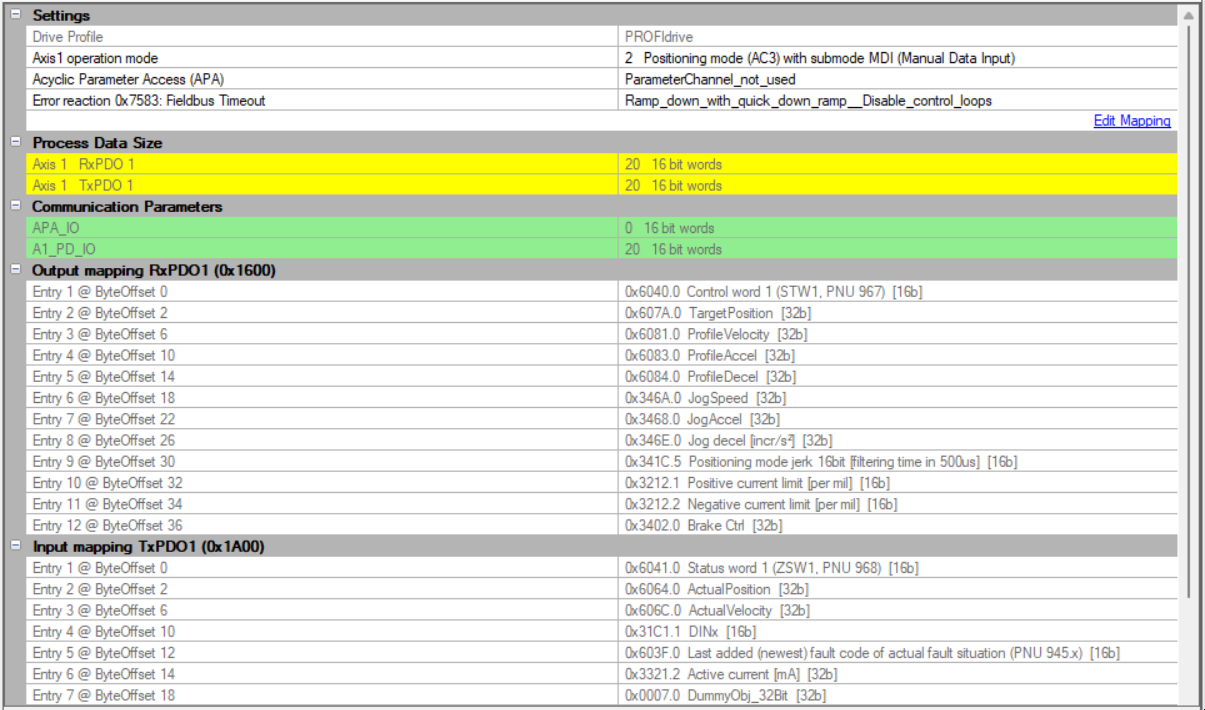
- In *Axis 1 > PROFINET* modificare gli oggetti inviati e ricevuti come nella seguente immagine
⚠️ Se l'operazione è stata effettuata con il PSD1 acceso, sarà necessario spegnerlo per qualche secondo perché la modifica abbia effetto
# 2. Configurazione del PSD1 Motor Drive
### Impostazioni Device
- In *Device > Device Settings > PSD multi filedbus*:
`Fieldbus type = Profinet`
### Impostazioni Profinet
- In *Axis 1 > PROFINET* modificare gli oggetti inviati e ricevuti come nella seguente immagine
 È ora possibile **effettuare il download** della configurazione sul PSD.
# 3. Configurazione del PLC Siemens
- Importare il file GSD del PSD1 su TIA Portal e aggiungerlo al progetto
ℹ️ Il file GSD si trova nel pacchetto Function Block Avanzata
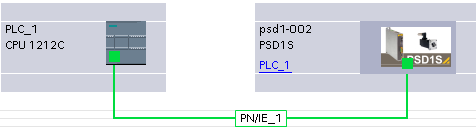
- Cliccare sul pulsante Not Connected e selezionare la CPU che farà da master, comparirà un collegamento in verde come in figura e sul device PSD il nome della CPU a cui verrà collegato
È ora possibile **effettuare il download** della configurazione sul PSD.
# 3. Configurazione del PLC Siemens
- Importare il file GSD del PSD1 su TIA Portal e aggiungerlo al progetto
ℹ️ Il file GSD si trova nel pacchetto Function Block Avanzata
- Cliccare sul pulsante Not Connected e selezionare la CPU che farà da master, comparirà un collegamento in verde come in figura e sul device PSD il nome della CPU a cui verrà collegato
 ### Impostare indirizzo IP del PSD:
- Dal pannello *Device Configuration* del modulo PSD impostare l'indirizzo IP dell'azionamento
### Impostare indirizzo IP del PSD:
- Dal pannello *Device Configuration* del modulo PSD impostare l'indirizzo IP dell'azionamento
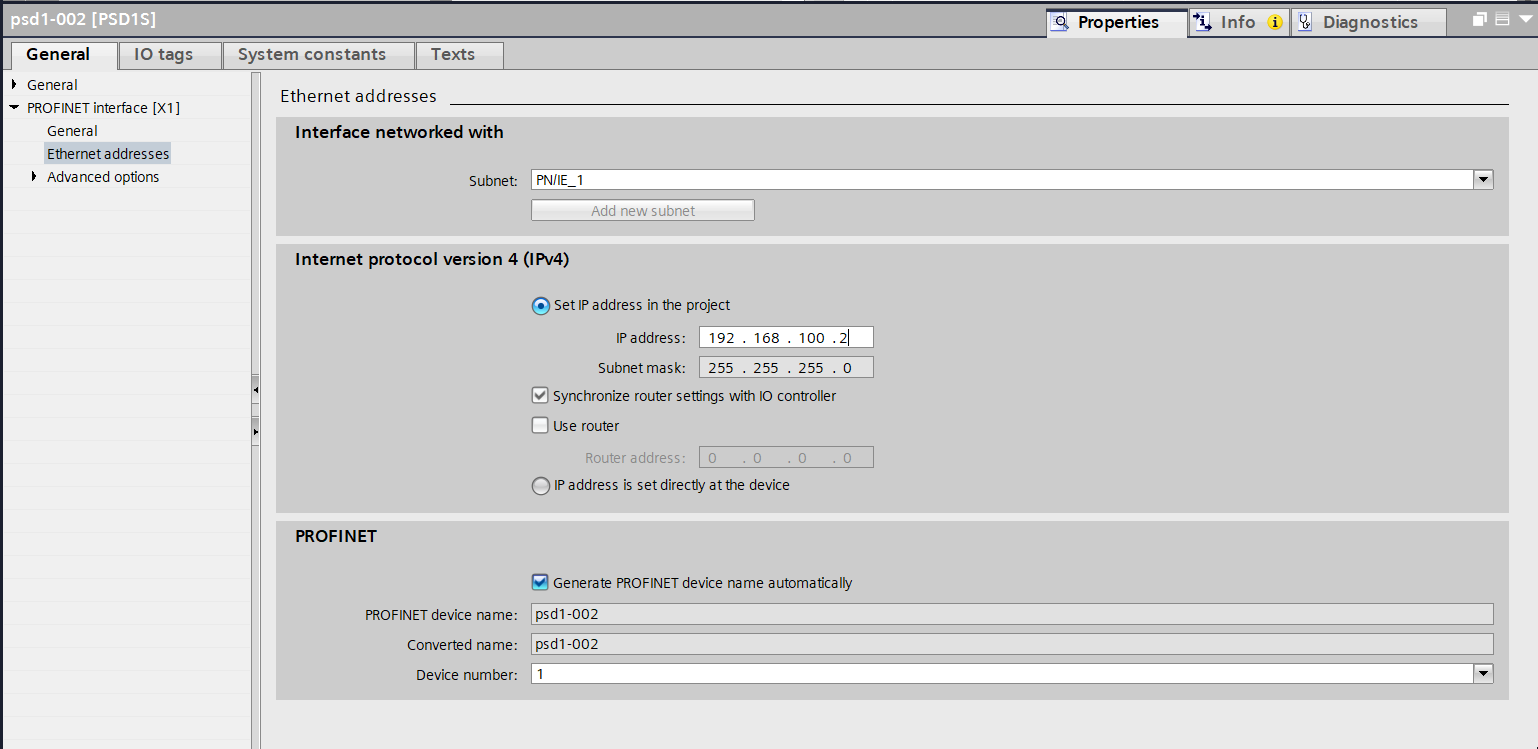
ℹ️ L'indirizzo IP verrà assegnato **SOLO dopo il download** della configurazione sul PLC. Potrebbe essere necessario un riavvio di entrambi i dispositivi.
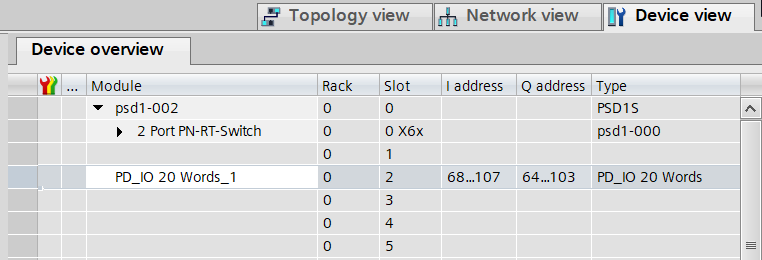
### Configurazione Profinet:
- Nel pannello *Device View* selezionare il modulo PSD
- Dalla scheda *Device Overview* eliminare i moduli APA_IO e PD_IO
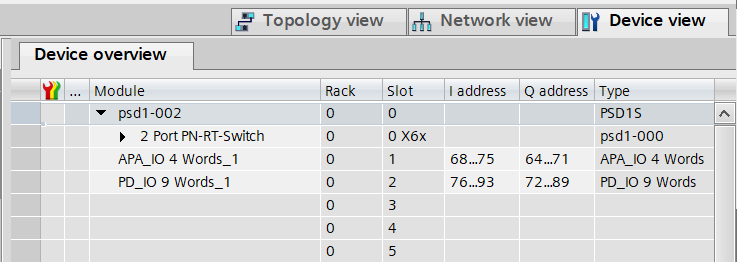
- Inserire dalla scheda *Hardware Catalog* il modulo **PD_IO 20 Words**
 # 4. Programmazione del PLC Siemens
Il Function Block avanzato permette, rispetto all'FB base, di controllare tramite fieldbus parametri aggiuntivi quali velocità e accelerazione di Jog, limitazione di corrente e freno.
Richiedendo un maggior numero di words Profinet rispetto alla configurazione base, l'applicazione avanzata è compatibile unicamente con PSD1 ad asse singolo.
Di seguito la struttura dei dati scambiati tra PSD e PLC:
- Ouptut PSD --> Input PLC
| Nome | DataType | Contenuto |
|-------------|-----------|---------------------------|
|`0x6041.0` | WORD | Status word |
|`0x6064.0` | LREAL | Posizione attuale |
|`0x606C.0` | LREAL | Velocità attuale |
|`0x31C1.1` | WORD | Input digitali Drive |
|`0x603F.0` | WORD | Codice errore Drive |
|`0x3321.2` | LREAL | Corrente attuale |
- Output PLC --> Input PSD
| Nome | DataType | Contenuto |
|-------------|-----------|---------------------------|
|`0x6040.0` | WORD | Control word |
|`0x6081.0` | LREAL | Posizione target |
|`0x6083.0` | LREAL | Velocità posizionamento |
|`0x6084.0` | LREAL | Accel. posizionamento |
|`0x346A.0` | LREAL | Decel. posizionamento |
|`0x3468.0` | LREAL | Velocità Jog |
|`0x346E.0` | LREAL | Accel. Jog |
|`0x341C.5` | WORD | Decel. Jog |
|`0x3212.1` | WORD | Jerk |
|`0x3212.2` | WORD | Limite corrente positivo |
|`0x3402.0` | LREAL | Limite corrente negativo |
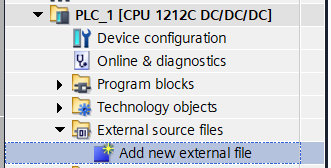
### Importare il Function Block in TIA Portal:
Per poter utilizzare l'FB in TIA Portal sarà necessario importarne il codice sorgente dal pacchetto *FB avanzato per PSD1*
- In *Project Tree > PLC_1 > External source files* selezionare la voce *Add new external file* e indicare il percorso del file *FB_PSD_1_0_2.scl*
# 4. Programmazione del PLC Siemens
Il Function Block avanzato permette, rispetto all'FB base, di controllare tramite fieldbus parametri aggiuntivi quali velocità e accelerazione di Jog, limitazione di corrente e freno.
Richiedendo un maggior numero di words Profinet rispetto alla configurazione base, l'applicazione avanzata è compatibile unicamente con PSD1 ad asse singolo.
Di seguito la struttura dei dati scambiati tra PSD e PLC:
- Ouptut PSD --> Input PLC
| Nome | DataType | Contenuto |
|-------------|-----------|---------------------------|
|`0x6041.0` | WORD | Status word |
|`0x6064.0` | LREAL | Posizione attuale |
|`0x606C.0` | LREAL | Velocità attuale |
|`0x31C1.1` | WORD | Input digitali Drive |
|`0x603F.0` | WORD | Codice errore Drive |
|`0x3321.2` | LREAL | Corrente attuale |
- Output PLC --> Input PSD
| Nome | DataType | Contenuto |
|-------------|-----------|---------------------------|
|`0x6040.0` | WORD | Control word |
|`0x6081.0` | LREAL | Posizione target |
|`0x6083.0` | LREAL | Velocità posizionamento |
|`0x6084.0` | LREAL | Accel. posizionamento |
|`0x346A.0` | LREAL | Decel. posizionamento |
|`0x3468.0` | LREAL | Velocità Jog |
|`0x346E.0` | LREAL | Accel. Jog |
|`0x341C.5` | WORD | Decel. Jog |
|`0x3212.1` | WORD | Jerk |
|`0x3212.2` | WORD | Limite corrente positivo |
|`0x3402.0` | LREAL | Limite corrente negativo |
### Importare il Function Block in TIA Portal:
Per poter utilizzare l'FB in TIA Portal sarà necessario importarne il codice sorgente dal pacchetto *FB avanzato per PSD1*
- In *Project Tree > PLC_1 > External source files* selezionare la voce *Add new external file* e indicare il percorso del file *FB_PSD_1_0_2.scl*
- Ora è necessario generare l'FB premendo il tasto destro del mouse sul file appena importato e selezionando la voce *generate blocks from source*
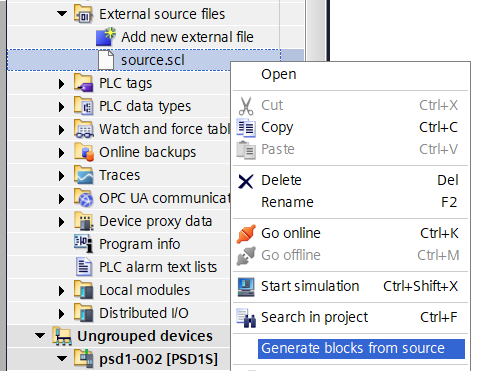
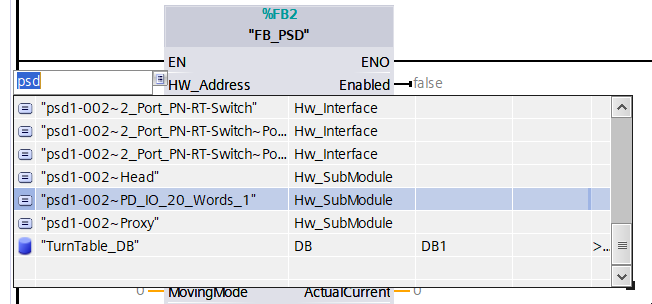
A questo punto sarà possibile richiamare il blocco nella sezione desiserata, assegnargli un'istanza e parametrizzarlo.
### Parametrizzazione del Function Block:
- Input:
| Nome | DataType | Funzione |
|-----------------|----------|----------------------------------------|
| `HW_Address` | HW_IO | Indirizzo hardware Profinet del PSD1 |
| `Enable` | BOOL | Abilitazione Drive |
| `Reset` | BOOL | Reset allarmi Drive |
| `QuickStop` | BOOL | Fermata rapida Drive 1 |
| `OpenBrake` | BOOL | Apertura freno quando `Enable = 0` |
| `StartMove` | BOOL | Start movimento (NON-latching) |
| `JogP` | BOOL | Comando Jog positivo |
| `JogN` | BOOL | Comando Jog negativo |
| `Homing` | BOOL | Avvio procedura di homing del Drive |
| `MovingMode` | INT | Modalità di movimento |
| `Limit_Range` | INT | Finestra di raggiungimento `TargetRef` |
| `PosCurrentLimit`| INT | Limite di corrente positivo |
| `NegCurrentLimit`| INT | Limite di corrente negativo |
| `JogSpeed` | DINT | Velocità di Jog |
| `JogAccel` | DINT | Acccel. Jog |
| `JogDecel` | DINT | Decel. Jog |
| `Speed` | DINT | Velocita posizionamento |
| `Accel` | DINT | Accel. posizionamento |
| `Decel` | DINT | Decel. posizionamento |
| `Jerk` | INT | Jerk posizionamento |
| `TargetRef` | DINT | Target di posizione/velocità 2 |
1 Il drive necessita di essere riabilitato tramite `Enable` dopo un `QuickStop`
2 `TargetRef` rappresenta il target di posizione per `MovingMode = 0/1` oppure di velocità per `MovingMode = 2`
la variabile `HW_Address` identifica il driver specifico controllato dalla FB e può essere configurato dinamicamente scrivendo al suo interno l'oggetto Profinet corrispondente al Drive desiderato
La variabile `MovingMode` può assumere valori 0-3 corrispondenti alle seguenti modalità di movimento:
| Valore | Funzione |
|-----|-----------------------|
| `0` | Controllo assoluto |
| `1` | Controllo relativo |
| `2` | Controllo in velocità |
| `3` | Modalità Jog |
- Output:
| Nome | DataType | Funzione |
|---------------------|----------|----------------------------------|
| `Enabled` | BOOL | Drive abilitato |
| `SafeTorqueOff` | BOOL | STO attivato |
| `Error` | BOOL | Errore Drive |
| `Moving` | BOOL | Motore in movimento |
| `Homed` | BOOL | Homing eseguito |
| `TargetReached` | BOOL | Target posizione/velocità raggiunto |
| `InPos` | BOOL | la posizione è in `TargetRef ± Limit_Range` |
| `ActualPos` | DINT | Posizione attuale |
| `ActualSpeed` | DINT | Velocità attuale |
| `ActualCurrent` | DINT | Corrente attuale |
| `CommunicationError`| BOOL | Comunicazione interrotta o configurazione Profinet errata |
| `DriveStatus` | INT | Stato del Drive |
| `_Status` | STRING[30] | Descrizione dello stato |
| `ErrorCode` | WORD | Ultimo codice di errore Drive (lista allarmi PSD) |
| `ErrorQuittable` | BOOL | Indica se l'errore è resettabile 3 |
| `ErrorDescription` | STRING[100] | Descrizione dell'errore |
3 Se `ErrorQuittable = False` sarà necessario riavviare il drive per resettare l'errore
### Esempi di modalità di movimento:
- Modalità di Movimento Assoluto o Relativo (`MovingMode = 0/1`)
I parametri necessari sono:
| Nome | Valore |
|---------------|-----------|
| `MovingMode` | `0` |
| `Speed` | `305000` |
| `Accel` | `1000000` |
| `Decel` | `1000000` |
| `TargetRef` | `2450` |
`TargetRef` corrisponde alla quota da raggiungere in modalità assoluta o all'incremento in modalita relativa.
- Modalità di Movimento in Velocità (`MovingMode = 2`)
I parametri necessari sono:
| Nome | Valore |
|---------------|-----------|
| `MovingMode` | `2` |
| `Accel` | `1000000` |
| `Decel` | `1000000` |
| `TargetRef` | `305000` |
`TargetRef` corrisponde alla velocità da mantenere e può essere modificato anche in movimento.
Il motore può essere fermato con `StartMove = 0` oppure con `TargetRef = 0`.
- Modalità di Movimento Jog (`MovingMode = 3`)
I parametri necessari sono:
| Nome | Valore |
|---------------|-----------|
| `MovingMode` | `3` |
| `JogSpeed` | `20000` |
| `JogAccel` | `1000000` |
| `JogDecel` | `1000000` |
Il movimento viene gestito tramite gli ingressi `JogP` e `JogN`.