2. Collegamenti elettrici
2.1 Pannello Operatore e Teleassistenza
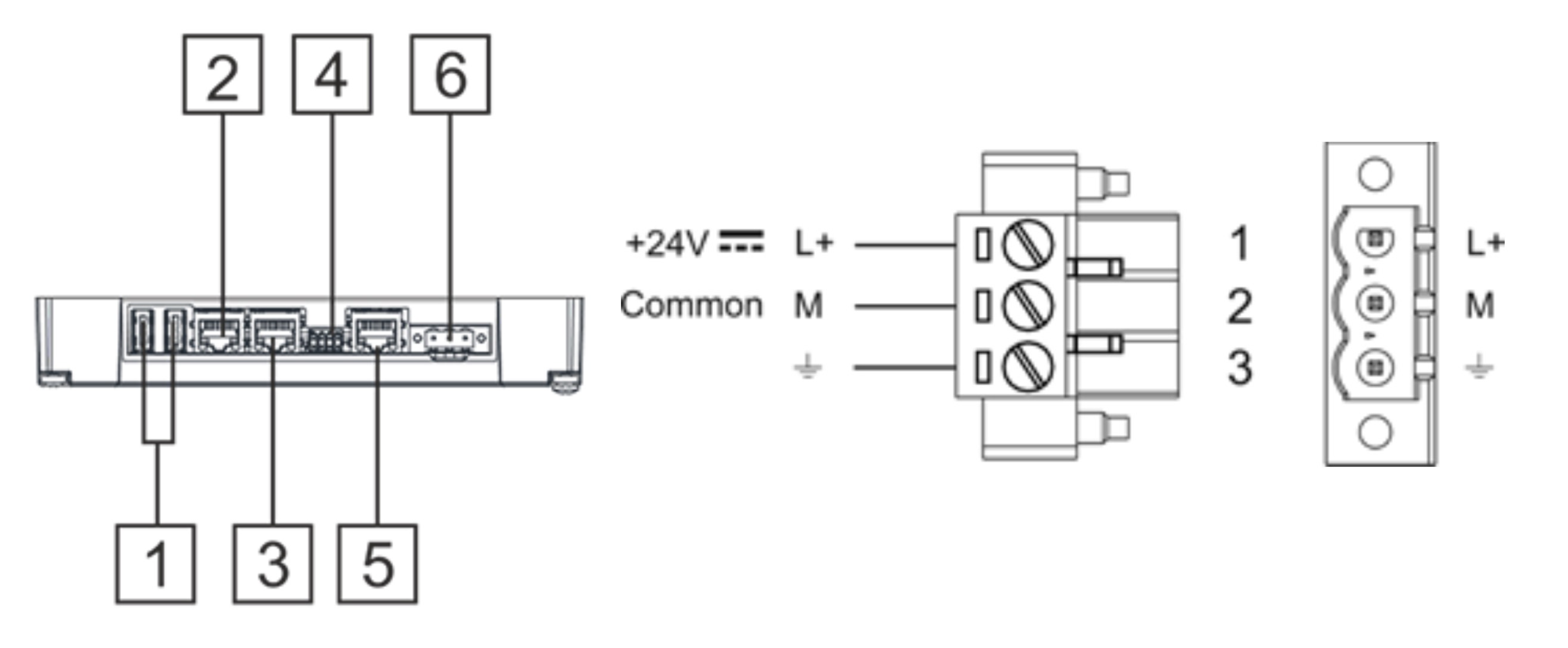
Il display HMI è alimentato a 24V mediante il connettore (6) posto nella parte inferiore del pannello. Allo stesso connettore andrà collegata la messa a terra utilizzando un cavo da 1,5mm2. Il modulo di teleassistenza utilizza un connettore analogo.
⚠️ La messa a terra deve essere eseguita sempre secondo le normative applicabili.
2.2 Controller
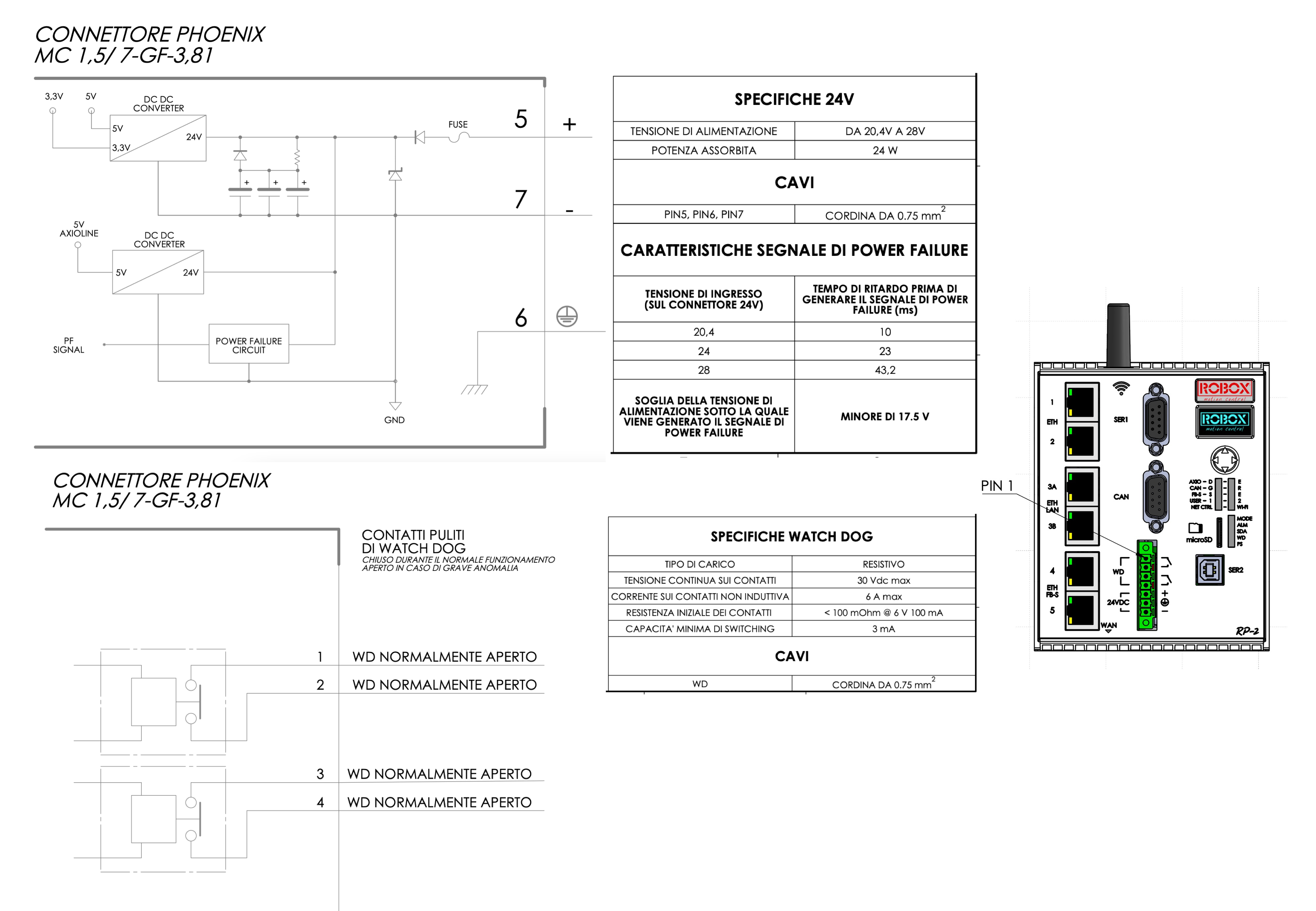
Il controllo Robox RP-2 viene alimentato a 24V dal connettore posto sul fronte del dispositivo, a cui andrà collegata necessariamente anche la messa a terra. Lo stesso connettore fornisce, inoltre, due contatti di "WatchDog", da collegare in serie alla catena di emergenze dell'impianto, che scateneranno lo stato di emergenza nel caso in cui il controller dovesse incorrere in una grave anomalia.
⚠️ La messa a terra deve essere eseguita sempre secondo le normative applicabili.
La pressa SmartPush è provvista di ingressi e uscite digitali e di un modulo di ingresso analogico 0-10V per la lettura della cella di carico.
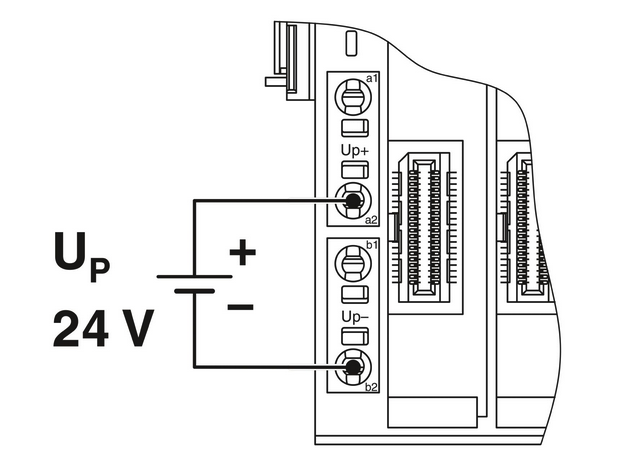
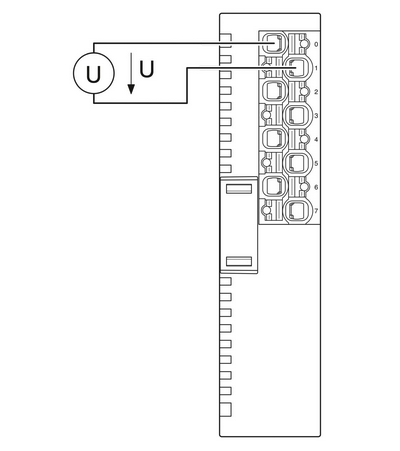
Al controller è collegato il modulo bus Axioline AXC-BS a cui è collegato il backplane Axioline SmartElements a 4 slots AXL-F-BP-SE4, quest ultimo necessita di alimentazione 24v separata fornita come nell'immagine seguente
Nei 4 slots vegono inseriti i moduli di I/O in questo ordine:
Uscite Digitali AXL-SE-DO16/1 |
Ingressi Analogici AXL-SE-AI4-U010 |
Ingressi Digitali AXL-SE-DI16/1 |
Modulo Cieco AXL-SE-SCA |
-
Uscite Digitali:
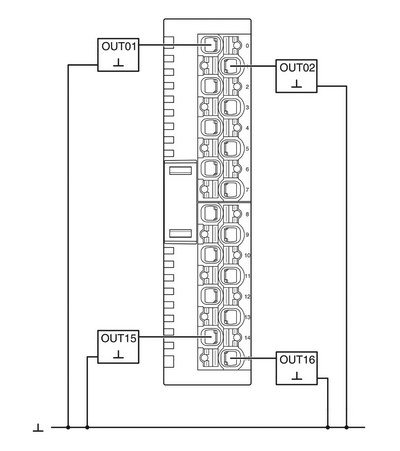
Out01Drive Abilitato Out09n.c. Out02Drive OK Out10n.c. Out03Lavorazione Terminata Out11n.c. Out04Ritorno Terminato Out12n.c. Out05Pezzo Buono Out13n.c. Out06Pezzo Scartato Out14n.c. Out07In Automatico Out15n.c. Out08n.c. Out16n.c. -
Ingressi Digitali:
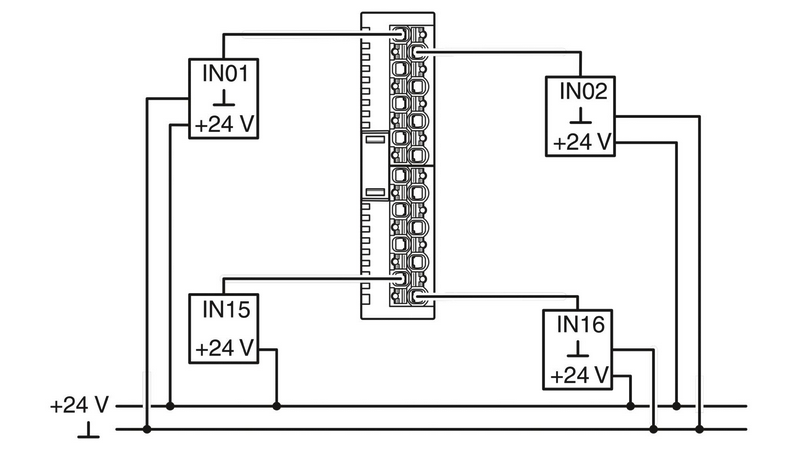
In01Abilitazione In09n.c. In02Start Lavorazione In10n.c. In03Start Ritorno In11n.c. In04Reset Allarmi In12n.c. In05n.c. In13n.c. In06n.c. In14n.c. In07n.c. In15n.c. In08n.c. In16n.c. -
Ingressi Analogici:
In01Lettura cella di carico 1 In02Lettura cella di carico 2 In03Lettura cella di carico 3 In04Lettura cella di carico 4 ℹ️ La cella di carico è integrata nell'elettro-cilindro Duplomatic
2.4 Azionamento PSD
⚠️ Prima di effettuare i collegamenti elettrici, osservare quanto segue:
-
Tutte le operazioni di collegamento vanno eseguite da un elettricista qualificato
-
Scollegare l'alimentazione prima di eseguire qualsiasi tipo di collegamento
-
Attendere circa 3 minuti prima di operare dopo aver scollegato l'alimentazione
-
Verificare che la tensione sui terminali DC- e DC+ sia inferiore ai 50V (PSD1S: X63/3, X63/5 | PSD1M: bandella 3 e bandella 5 dall'alto)
-
Assicurarsi che nulla entri all'interno dei dispositivi (viti, residui di cavo elettrico, ...)
PSD1-S
-
Collegare l'alimentazione della logica ed il circuito di STO al connettore frontale X17 come da tabella:
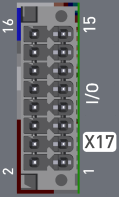
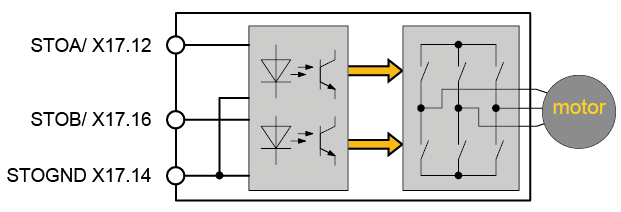
Pin su X17 I/O Descrizione 0124V+ Alimentazione Logica 020V - GND Alimentazione Logica 0324V+ Alimentazione Uscite 04In0 Ingresso 0 05In1 Ingresso 1 06In2 Ingresso 2 07In3 Ingresso 3 080V - GND GND 09Out0 Uscita 0 100V - GND GND 11Out1 Uscita 1 12STO - A Canale A STO 13n.c. 14STO - GND Comune STO 15n.c. 16STO - B Canale B STO -
Collegare l'alimentazione di potenza 230V (monofase) al connettore X63 come da tabella:
⚠️ Verificare che la tensione sui terminali DC- e DC+ sia inferiore ai 50V (X63/3, X63/5)

Pin su X63 I/O Descrizione 01Rin Resistenza Interna 02-R Output per Resistenza 03+R Output per Resistenza 04DC+ DC Bus + 05DC- DC Bus - 06L3 Fase 3 07L2 Fase 2 - N 08L1 Fase 1 - L (230V) 09PE Terra
⚠️ Il DC Bus NON è 24V. NON collegare alla 24V.
⚠️ Nel caso in cui NON si usi una resistenza di frenatura esterna, il ponticello tra X63/1 e X63/2 DEVE essere presente.
⚠️ Per ridurre le interferenze elettromagnetiche, è importante collegare in serie all'alimentazione di potenza il filtro di rete in dotazione.
-
Il sistema SmartPush utilizza un motore frenato che ha come feedback un encoder assoluto multi-giro HIPERFACE DSL. Il cavo è unico e trasporta l'alimentazione di potenza, l'alimentazione del freno (24V) ed il segnale di feedback proveniente dall'encoder.
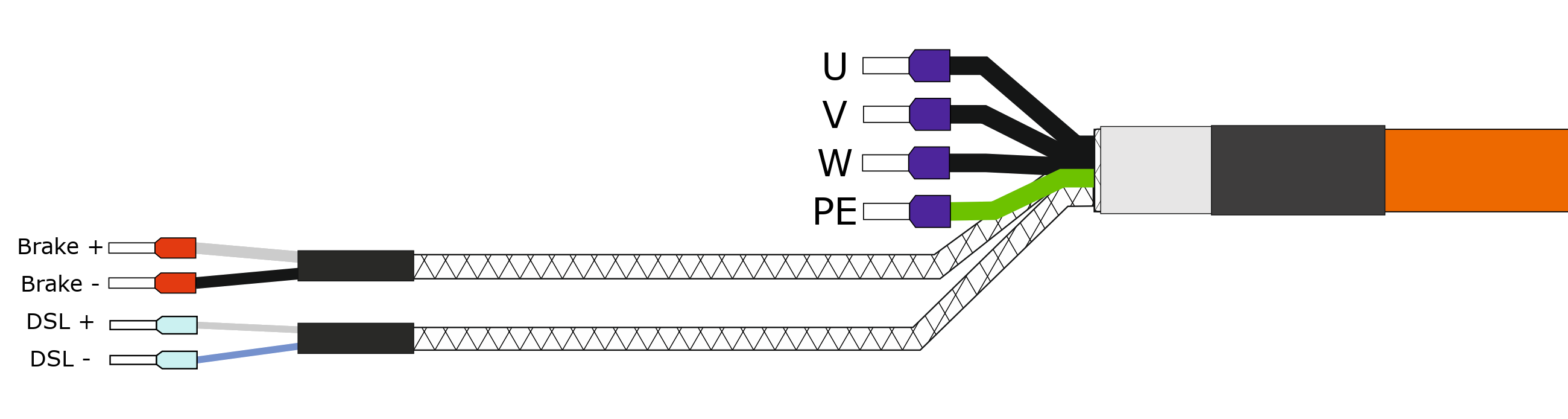
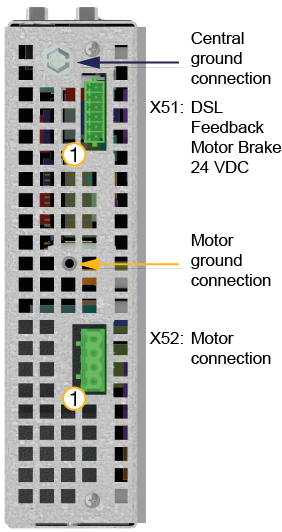
L'alimentazione del freno, il doppino del freno ed il doppino del feedback DSL vanno collegati al connettore X51, mentre i cavi di potenza del motore al connettore X52 posti sulla base del PSD secondo il seguente schema:
Pin su X51 I/O Descrizione 0124V+ Alimentazione Freno 020V - GND GND Alimentazione Freno 03Br+ Uscita Freno + (MAX 1.0A) 04Br- Uscita Freno - 05DSL+ Feedback DSL + 06DSL- Feedback DSL - Pin su X52 I/O Descrizione 01U Fase L1 02V Fase L2 03W Fase L3 04PE Terra
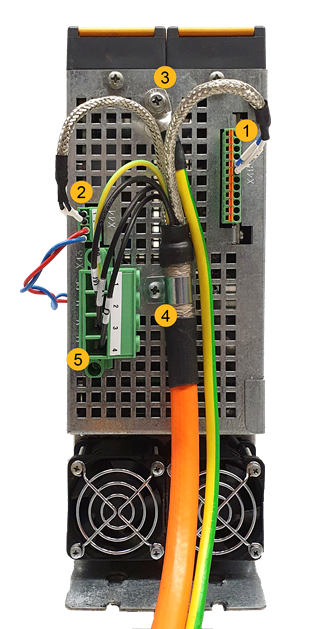
⚠️ È importante **collegare lo schermo del cavo alla carcassa** dell'azionamento (4), in caso contrario il feedback non funzionerà correttamente e il drive sarà soggetto ad errori.
⚠️ Un'inversione delle fasi del motore potrebbe comportare anomalie in fase di abilitazione/movimento del motore.

PSD1-M
-
Collegare le bandelle di alimentazione tra il modulo alimentatore e l'azionamento come nell'immagine seguente:
⚠️ Verificare che la tensione sui terminali DC- e DC+ sia inferiore ai 50V (bandella 3 e bandella 5)
⚠️ Il DC Bus NON è 24V. NON collegare alla 24V.
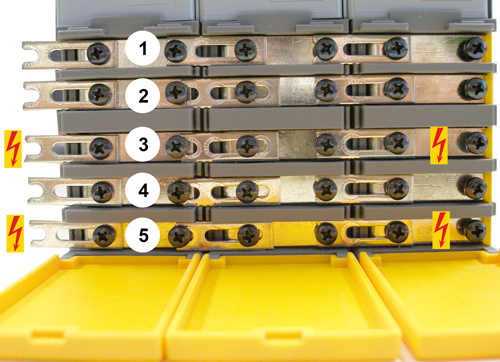
124V+ 20V - GND 3DC BUS - 4PE (Terra) 5DC BUS + -
Collegare al connettore X9 presente sul davanti dell'unità l'alimentazione a 24V per la logica dei moduli:
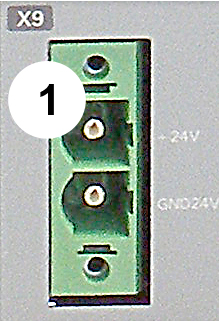
124V+ 20V - GND -
Collegare al connettore X41 presente sul fondo dell'unità l'alimentazione di potenza 400V (trifase):

PETerra L3Fase L3 L2Fase L2 L1Fase L1 -
Collegare il circuito di STO al connettore X17 posto sul frontale dell'azionamento come da tabella:
Pin su X17 I/O Descrizione 0124V+ Uscita 24V 020V - GND GND 0324V+ Alimentazione Uscite 04In0 Ingresso 0 05In1 Ingresso 1 06In2 Ingresso 2 07In3 Ingresso 3 080V - GND GND 09Out0 Uscita 0 100V - GND GND 11Out1 Uscita 1 12STO - A Canale A STO 13n.c. 14STO - GND Comune STO 15n.c. 16STO - B Canale B STO ⚠️ Per ridurre le interferenze elettromagnetiche, è importante collegare in serie all'alimentazione di potenza il filtro di rete in dotazione.
-
Il sistema SmartPush utilizza un motore frenato che ha come feedback un encoder assoluto multi-giro HIPERFACE DSL. Il cavo è unico e trasporta l'alimentazione di potenza, l'alimentazione del freno (24V) ed il segnale di feedback proveniente dall'encoder.
-
Il doppino del feedback DSL va collegato al conettore X48 secondo il seguente schema:

Pin su X48 I/O Descrizione 01n.c. n.c. 02n.c. n.c. 03n.c. n.c. 04n.c. n.c. 05n.c. n.c. 06n.c. n.c. 07DSL+ Feedback DSL + 08DSL- Feedback DSL - 09n.c. n.c. 10n.c. n.c. 11n.c. n.c. 12n.c. n.c. -
L'alimentazione del freno ed il doppino del freno vanno collegati al connettore X46 posto sul lato inferiore dell'azionamento
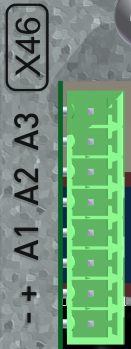
Pin su X46 I/O Descrizione 01n.c. n.c. 02n.c. n.c. 03n.c. n.c. 04n.c. n.c. 05Br+ Uscita Freno + (MAX 1.6A) 06Br- Uscita Freno - 0724V+ Alimentazione Freno 080V - GND GND Alimentazione Freno ℹ️ ↓↓↓ SOLO per
PSD1MW1800↓↓↓
In questo caso il freno andrà collegato al connettore X44 secondo lo schema sottostante:
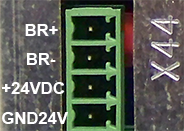
Pin su X44 I/O Descrizione 01Br+ Uscita Freno + (MAX 1.6A) 02Br- Uscita Freno - 0324V+ Alimentazione Freno 040V - GND GND Alimentazione Freno ℹ️ ↑↑↑ SOLO per
PSD1MW1800↑↑↑
-
Collegare i cavi di potenza del motore al connettore x45 secondo il seguente schema:

Pin su X45 I/O Descrizione 01n.c. n.c. 02n.c. n.c. 03n.c. n.c. 04n.c. n.c. 05n.c. n.c. 06n.c. n.c. 07n.c. n.c. 08n.c. n.c. 09AU Fase L1 10AV Fase L2 11AW Fase L3 12FE & PE Terra ℹ️ ↓↓↓ SOLO per
PSD1MW1800↓↓↓
In questo caso i cavi di potenza del motore andranno collegati al connettore X43 secondo lo schema sottostante:
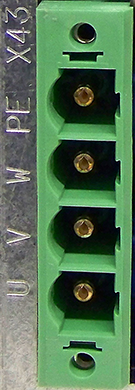
Pin su X43 I/O Descrizione 01U Fase L1 02V Fase L2 03W Fase L3 04FE & PE Terra ℹ️ ↑↑↑ SOLO per
PSD1MW1800↑↑↑
⚠️ È importante collegare lo schermo del cavo alla carcassa dell'azionamento (4), in caso contrario il feedback non funzionerà correttamente e il drive sarà soggetto ad errori.
⚠️ Un'inversione delle fasi del motore potrebbe comportare anomalie in fase di abilitazione/movimento del motore.

2.5 Riduzione dei disturbi
Oltre alla messa a terra di tutti i componenti elettrici come indicato nelle sezioni precedenti, per ridurre i disturbi è consigliabile seguire alcuni accorgimenti:
-
Separare i dispositivi soggetti a disturbi da quelli generatori di disturbi utilizzando schermature opportune
-
Utilizzare filtri di rete per eliminare le interferenze elettromagnetiche dall'alimentazione di potenza
-
Utilizzare cavi schermati di buona qualità con sezione adatta al carico da pilotare
-
Eseguire una corretta messa a terra dei componenti e dell'impiato secondo le normative applicabili, in modo da garantire la migliore dispersione dei disturbi possibile
-
Ridurre al minimo la lughezza dei cavi soggetti a disturbi per ridurre l'effetto delle interferenze elettromagnetiche
-
Utilizzare dispositivi di smorzamento come resistenze e condensatori per ridurre gli effetti dei sovraccarichi e delle sovratensioni
-
Utilizzare un sistema di alimentazione adeguato per garantire il corretto funzionamento delle apparecchiature
-
Pianificare con attenzione il sistema elettrico tenendo in conto gli elementi di disturbo così da prevenire eventuali malfunzionamenti del sistema
-
Utilizzare dispositivi di protezione quali fusibili, interruttori magnetotermici, protezioni da sovratensione per proteggere l'impianto da danni elettrici